Technology
7 min read
Quantum Annealers Tackle Robot Motion Problems: A New Proof of Concept
The Quantum Insider
January 19, 2026•3 days ago
AI-Generated SummaryAuto-generated
Russian scientists have demonstrated a proof of concept for using quantum annealers to solve robot motion problems. By reformulating inverse kinematics as a binary optimization problem and solving it on D-Wave hardware, the researchers achieved up to 30x faster results on large instances with reduced qubit use. While not yet outperforming classical solvers, the study shows current quantum hardware can address simplified robotic motion planning.
Insider Brief
A collaboration led by Q Deep, Innopolis University, the Moscow Institute of Physics & Technology, Central University in Moscow and the Artificial Intelligence Research Institute (AIRI) demonstrated that quantum annealing can solve a robotics inverse-kinematics problem as a proof of concept.
The study reformulated inverse kinematics as a binary optimization problem and solved it on D-Wave hardware, finding that Zephyr-based global embeddings and hybrid quantum–classical solvers reduced qubit use and delivered up to 30× faster results on large instances.
While the approach does not outperform advanced classical solvers, the results show current quantum hardware can address simplified robotic motion planning tasks with measurable accuracy and speed.
PRESS RELEASE — Q Deep, Innopolis University, the Moscow Institute of Physics & Technology, Central University in Moscow and the Artificial Intelligence Research Institute (AIRI) have joined to explore how quantum computers can help robots move.
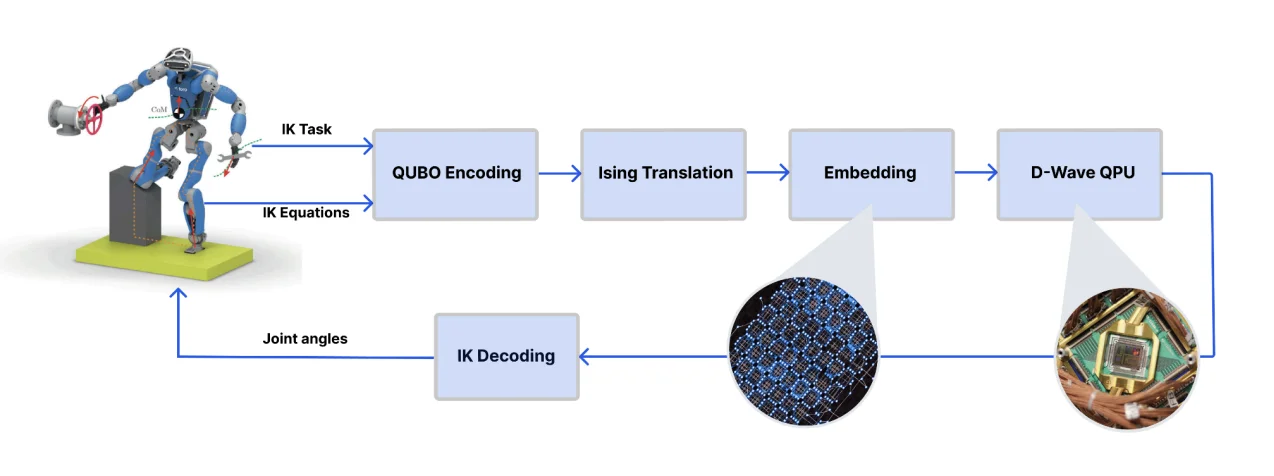
Their paper, released 31 December 2025 in Scientific Reports, reframes the robot “inverse kinematics” problem—finding the exact joint angles to reach a target position—as a Quadratic Unconstrained Binary Optimization (QUBO) and solves it on D‐Wave’s quantum annealing hardware.
In the study, joint angles are discretized into binary variables, with one‐hot constraints enforcing a single choice per joint. This converts the continuous inverse‐kinematics objective into a binary QUBO that can be embedded on D‐Wave’s Pegasus and Zephyr chip topologies and decoded back into valid joint angles.
The team compared embedding strategies and solvers; global embedding on the Zephyr topology used the fewest qubits and achieved the fastest access times, while a hybrid quantum–classical solver delivered up to 30‐fold faster solutions on large QUBO instances compared with purely classical approaches.
The researchers caution that their work is a proof of concept—it doesn’t beat state‐of‐the‐art continuous solvers—but it shows that quantum hardware from companies like D‐Wave can tackle a small robotics problem with measurable accuracy and speed.
Rate this article
Login to rate this article
Comments
Please login to comment
No comments yet. Be the first to comment!